


現在建設業界は、熟練職人の高齢化や若い世代の減少、インフラ老朽化に伴う補修工事の増加により、深刻な人手不足の状態にある。加えて、安全意識の高まりから、危険な作業は機械に任せようという考えが主流になりつつある。こうした背景から、人手に変わる全自動の建設機械(以下、建機)を開発し、作業現場に導入しようという取り組みが活発化している。
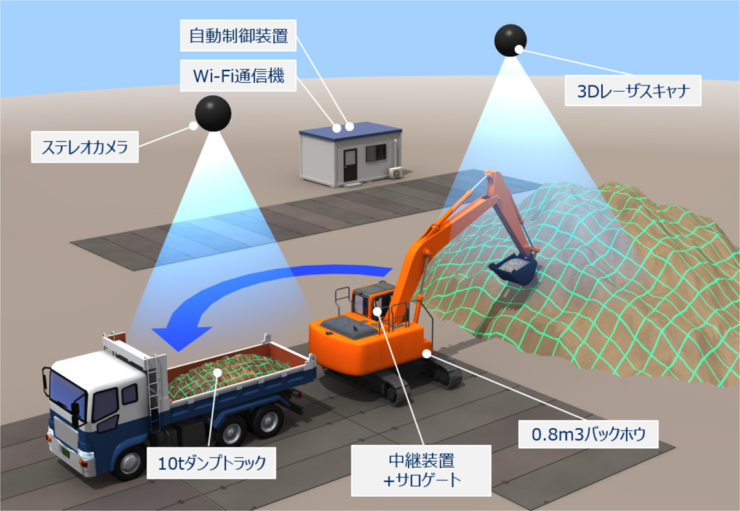
株式会社大林組と日本電気株式会社(以下、NEC)、大裕株式会社(大阪府寝屋川市)は「バックホウ自律運転システム」を共同開発した。バックホウとは、掘削用の油圧ショベルがオペレーター側に向けて取り付けられた建機のこと。

このシステムは大林組と大裕が開発した汎用遠隔操縦装置「サロゲート」(操作レバー部に装着するアタッチメントで、メーカーや機種を問わず対応が可能)や、NECの通信システム(ネットワークドコントロールシステム)、制御技術などを活用し、熟練技術が必要だったバックホウの掘削作業やトラックへの土砂の積み込み作業を完全無人自動化した。
建機の自動化を実現するには、まず熟練技術者の操縦データから効率的なアームの動かし方のモデルを生成し、そのモデルをもとに、ネットワークでつないだ建機を動かすのが一般的なプロセスとなる。

ただしバックホウなどの大型建機は乗用車の自動運転などとは異なり、「走る、止まる、曲がる」を制御するだけでなく、アームを伸ばしたり、土砂をすくい上げたり、回転したりと作業内容により姿勢や重心が変化する(動特性の変化)中での操作となる。また、自動運転では対処できない場合には遠隔操作となるが、その場合、通信の遅れなどにより応答遅延も発生するため、対処すべき変数がより多くなる。
バックホウ自律運転システムのおける動特性と応答遅延に適応するために、NECが開発したのが「適応予測制御技術」だ。同技術の研究開発を担当したNEC中央研究所の吉田裕志氏(博士(工学))とNEC新事業推進本部の印南貴春氏に話を聞いた。
* * *
まず吉田氏に「動特性の変化」と「応答遅延」について聞いた。

「動特性」とは、建機の姿勢・作業内容・機種などにより変化する特性を指す。例えば、バックホウのアームはヒンジを中心に回転させるが、その回転のしやすさや動きやすさはアームをどれくらい伸ばすか(姿勢)により変化する。あるいは、バケットに土を盛るか盛らないか(作業内容)、メーカーや機種によっても建機の動き方は変化する。こうした建機の特性が変化することを「動特性の変化」という。
「応答遅延」とは、例えばバックホウを手動で動かす場合であれば、操縦者がレバーを動かしてから、実際にアームが動き始めるまでの時間のズレを指す。その要因は、建機自体の重量のほか、建機が油圧式であることもあげられる。例えばバックホウであれば、レバーを動かしてからシリンダーに油が流れ、アームが動き出すが、その間に遅延が発生する。また機械の“遊び”や通信遅延も要因となる。
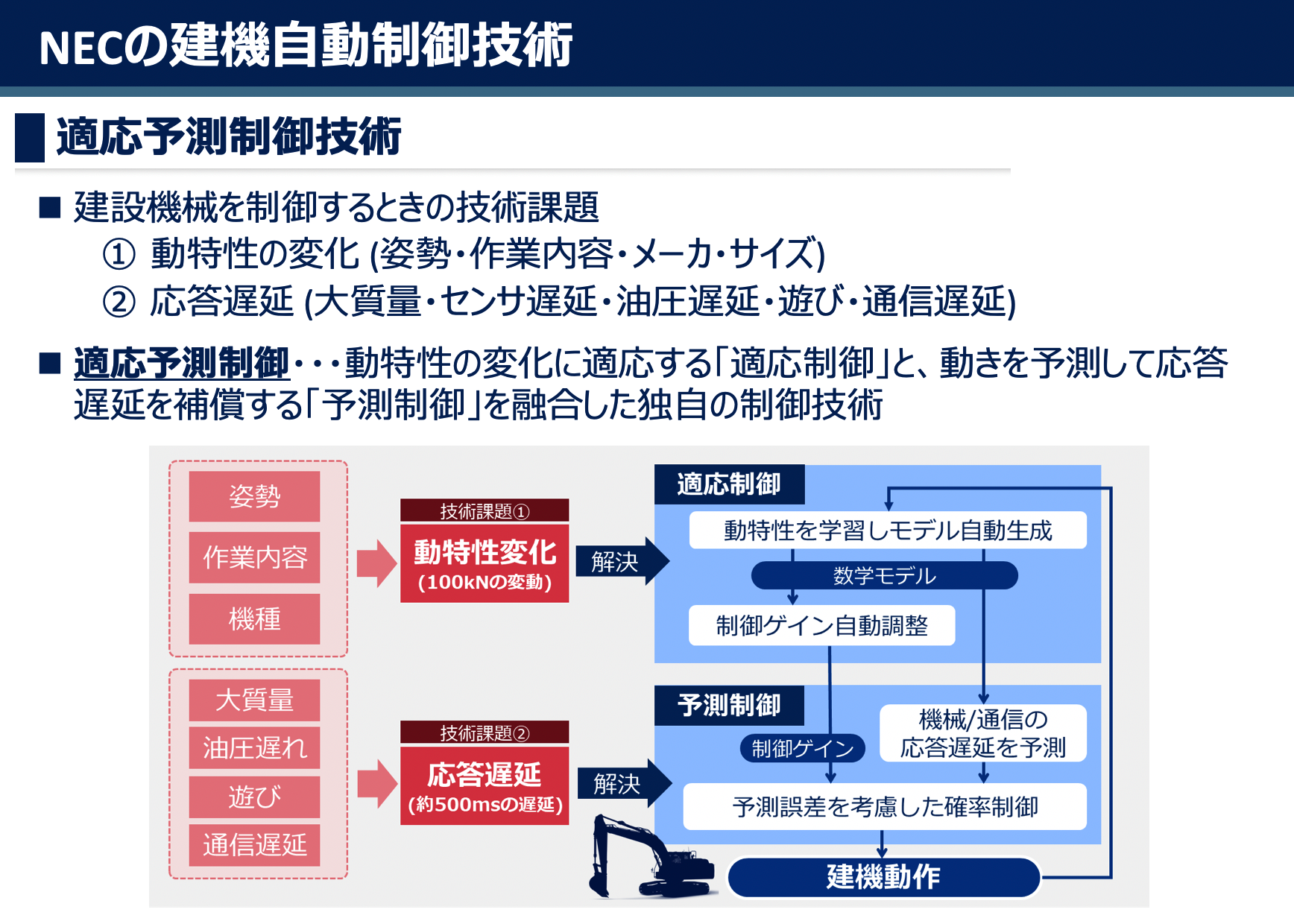
大型建機を制御するには、この2つの課題に適応する必要がある。そこで、動特性の変化に適応するために「適応制御技術」を。応答遅延に適応するために「予測制御技術」を開発し、この2つを融合し「適応予測制御技術」を作り出した。
「制御工学の研究では、それぞれ別々に研究がなされているのですが、それを入れ子のように融合したものはこれまでなく、そこが初ということになります」(吉田氏)。
適応予測制御技術ではどのようなことが行われているのか。吉田氏によると、まず適応制御技術により、掘削や土の持ち上げなど動作を行うたびに、建機の動特性を機械が学習し、どれくらいバケットに力を加えるかなどの入力値を自動調整。さらに予測制御技術により、予測誤差も含めて、命令が伝わるまでの時間を先読みし、バケットの位置などを予測しているという。
「要するに、実際の建機の状態に“適応すること“と“予測すること”、この両方をつなげて行うのが適応予測制御技術ということになります」(印南氏)。
ベースはロボットを遠隔操作する技術
適応予測制御技術にはベースとなる技術がある。それが、NECがロボットの「知能にあたる部分(アルゴリズムとコンピューティング)」と「知覚にあたる部分(センサー)」をクラウドで利用できるよう開発していた「遠隔制御技術」だ。
吉田氏によると、もともとロボティクスの進化は、通信でコントロールするロボット本体に「知能」と「知覚」にあたる機能を全て搭載しようという高機能化の方向で進んでいた。しかし、この方法ではロボット本体に全ての機能を搭載する必要があり、ロボットが高価になりすぎる上、機能も限定的になってしまうという課題が生じた。
そこでNECでは、ロボットから、「知能」と作業エリア全体を見るカメラなどの「知覚」にあたる機能を取り出し、別々に配置。これらをネットワークで統合することで、ロボット本体の高度化と低コスト化を実現した。
ところが「知能」と「知覚」をロボットから離してしまったがゆえに別の課題が生じる。通信遅延による応答遅延の問題が顕在化してしまう。その解決のために研究していたのが遠隔制御技術だ。
今回バックホウ自動化システムを開発するにあたり、遠隔制御技術をベースにした応答遅延に適応する技術はあったが、実際に大型建機を動かしてみると、動特性の変化も課題であることが判明。そこで応答遅延と動特性の変化の両方に適応する技術として適応予測制御技術の研究開発がはじまったという。


今後、適応予測制御技術はどういった場面で活用していくことを想定しているのか。印南氏は「まずはバックホウ以外の建機に適用すること」を想定しているという。
「これから人口減少による熟練工の減少や、インフラを維持できないといった社会課題が多数出てくると思います。その解決のために、今一番(人手が)足りなくなっているような部分が、ユーザーや市場から上がってくると思います。そういうところに優先して適応していくことになると考えています」(印南氏)。
バックホウ自律運転システムでは、まず熟練職人の操縦を機械に学習させる。そして学習した動きを実際の建機の動きに反映させるために適応予測制御技術を使っている。将来的には適応予測制御技術の活用データを蓄積し、それを機械学習に反映することで、「より精度の高い自動化を実現していく」と印南氏は述べる。
NECと大林組、大裕は2020年3月末までに、バックホウ自律運転システムを大林組の実際の土木現場で適用するという。建機の自動化は、社会実装に向け堅調に歩みを進めているようだ。