
昆虫触覚センサー搭載のドローンで匂いの発生源を探す
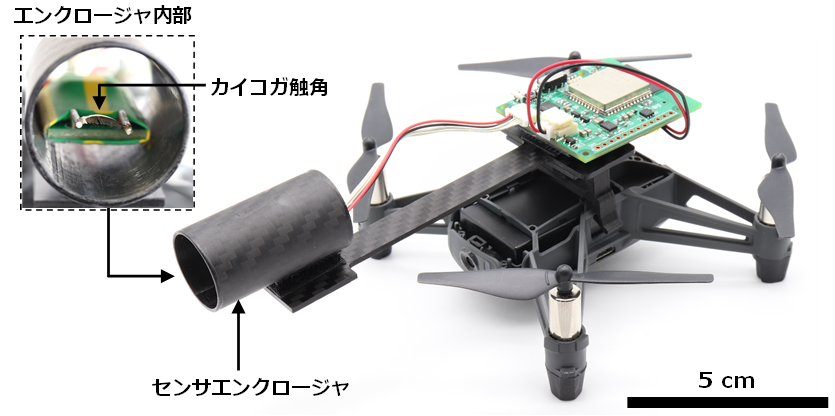
カイコガの触角センサーをTello EDUに搭載することで、気中の匂い物質を検出するドローン
いい匂いが漂ってくると「クンクン」とその匂いの元を探してみる。人や犬の話ではなく、それをドローンでやろうという試みがある。
東京大学先端科学技術研究センター生命知能システム分野の照月大悟特任助教、神崎亮平教授らの研究グループが開発した自立型バイオドローンは、昆虫の触角をセンサーとして搭載し、これを利用して匂いの発生源へ向かって飛行することができる。
空気中の匂いの分布は一様ではなく。発生源に近いからといって、必ずしも匂いがどんどん濃くなるというわけではない。そのため、センサー等を使って匂いの発生源を突き止めるのは難しく、危険物探知や災害発生時などその役割はニオイ探知犬など動物の嗅覚に頼らざるを得ない。
昆虫の触角をセンサーに利用
昆虫もまた優れた匂い物質検出能力を持っている。触覚などで匂いの発生源を突き止め、空気中の匂い物質を高感度、高選択、リアルタイムに検出することができる。
絹糸を生産する蚕の成虫であるカイコガの触覚は、メスが発する性フェロモンに敏感に反応する。昆虫触角の反応は、電気信号として検出することができるため、カイコガから切り取った触覚の両端に電極を配置することでセンサーとして利用することができる。
このセンサーを搭載した小型ドローンを、匂い物質の濃度と飛来方向をリアルタイムに検出し続けながら探索飛行を行うアルゴリズムを使って飛行させる。ドローンは回転飛行をしながら匂いの方向を突き止め、その方向に移動してまた回転飛行と探索を行う。これを繰り返しながら匂いの発生源に近づくことができる。
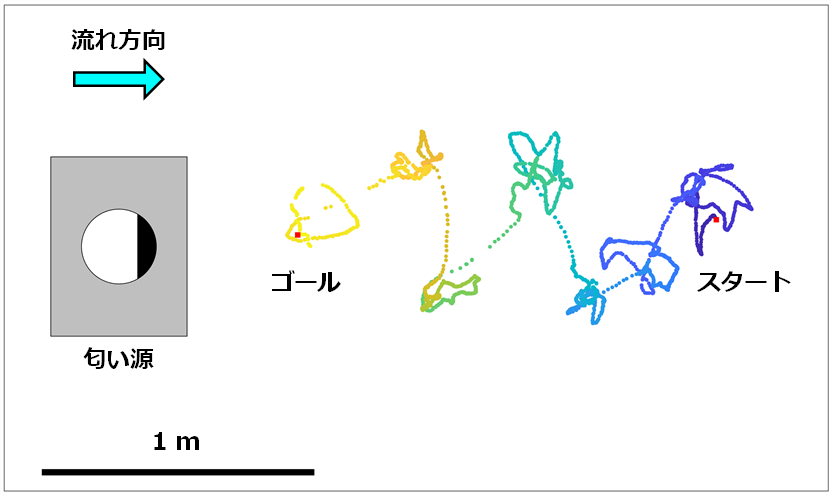
実験の過程で、センサーに指向性を持たせるためには筒状の覆いが必要であることや、探索のための飛行にはジグザグ飛行を行うより、回転運動と直進運動を組み合わせたスパイラルサージアルゴリズムを使った飛行の方が、匂い源探索には効率的で有効であることなどがわかったという。
現在は、カイコガの性フェロモンの匂いに反応するのみだが、カイコガは遺伝子組換えによって、他種の昆虫の性フェロモンに応答することがわかっている。つまり特定の匂い反応するカイコガを遺伝子組み換えによって生み出し、その触覚を使えば別の匂い発生源の探索ができるドローンとなる。





