
VR空間で「第3・第4の腕」の身体化に成功 メタバース体験でもあらたな感覚が生まれる?

東京大学大学院工学系研究科大学院生の荒井謙氏(東京大学駒場リサーチキャンパス内の研究室、「リビングラボ駒場」にて)
テクノロジーを活用して、人間の「身体機能の拡張(身体拡張)」を目指すさまざまな研究が行われている。
例えば、重量物を運搬する際、腰の負担を減らすパワーアシストスーツは、身体拡張の「強化」のカテゴリーに分類される。あるいは、もっと身近なところでは、杖などで身体動作を「代替」することも、身体拡張のひとつに分類できる。
これら「強化」や「代替」に加え、人間の身体機能を大きく拡張する可能性があると注目されているのが、「追加」のカテゴリーだ。身体機能の「追加」に関する研究は「余剰肢ロボティクス」とも呼ばれ、人間の身体に機械の腕(ロボットアーム)や人工指(第6の指)を「追加」する取り組みが進められている。
ただし、人工身体を「追加」して身体機能を拡張するには、もともと身体に属さないものが自分の身体のように感じられる感覚(身体化)が、必須要件となる。なぜなら、身体が違和感をおぼえる人工身体を使うと、意識がそちらに集中してしまうため、他の部位と合わせて作業することが難しくなるからだ。

このほど東京大学大学院工学系研究科の荒井謙大学院生、先端科学技術研究センターの齊藤寛人特任助教、稲見昌彦教授、慶應義塾大学の福岡正彬研究員、杉本麻樹教授および豊橋技術科学大学の上田祥代助教、北﨑充晃教授の共同研究チームは、VR空間において、足先の動きと連動する余剰肢ロボットアーム(以下、ロボットアーム)を開発し、「身体化」する実験に成功した。実験の参加者は、「まるで第3、第4の腕が増えたような感覚」を得たという。
※この実験は、自在化身体プロジェクト(JST ERATO JPMJER1701)の支援を受けて実施されたもの
研究の中心メンバーである荒井氏に、実験内容とその成果、さらにこの研究が進むことで、実社会やメタバース空間にどのような影響をもたらす可能性があるのかを聞いた。
* * *
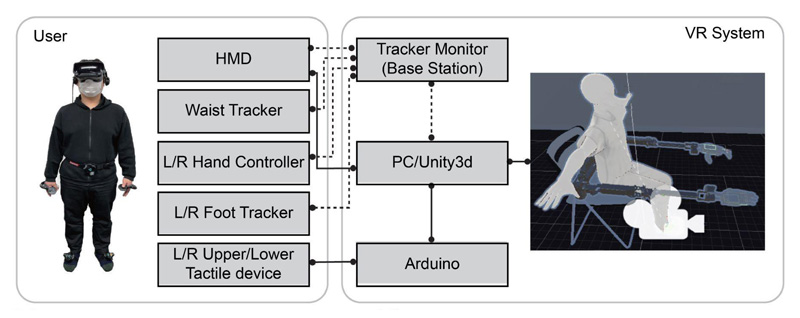
荒井氏らは、具体的にどのような実験を行ったのか。装用者(実験の参加者)はまず、一人称視点の情報を提供するヘッドマウントディスプレイ(HMD)と、装用者の動きを検知するトラッカーを頭部、両手、両足、腰に取り付ける。これら6カ所に取り付けられたセンサーによって装用者の動きを捉え、VR環境下(画面内)のアバターの全身運動や、ロボットアームの動きに変換する仕組みになっている。
「HMDと両手のハンドコントローラーによってアバターの頭や手を動かします。さらに、トラッカーがついた(自分の)足を動かすことでロボットアームを操作できるようになっています」(荒井氏)
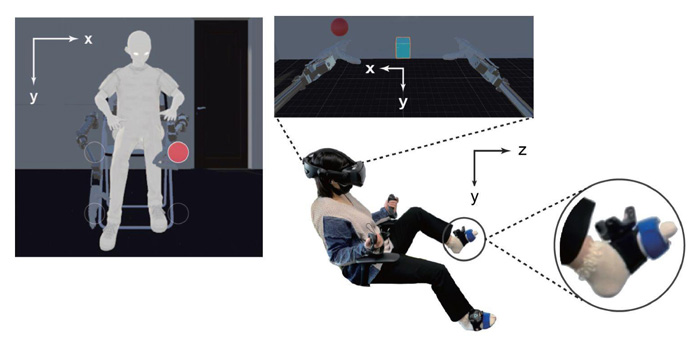
実験の参加者の課題は、足でロボットアームを操作して、VR空間内に表示されるボールに触れることだ。この操作をすることでロボットアームも、自分の身体の一部として捉えられるようになるのか。また、ロボットアーム周辺の空間(近位空間)に対する知覚に変化が起こるのかどうかを調べたという。
ちなみに、この実験ではロボットアームがボールに触れた瞬間に、足先に取り付けられた振動装置が震える仕組みになっているが、「これが大きなポイント」だと荒井氏は説明を加える。
人間の知覚には、味覚と視覚、視覚と聴覚など異なる感覚が相互作用し、脳の錯覚が起こるクロスモーダル現象(※)が起こることがある。こうした錯覚を利用し、「今回は視覚(ボールに触れるのを見る)と触覚(ボールに触れると足先が振動する)という2つのチャンネルを使って、ロボットアームの身体化を促進した」とのことだ。
※参考記事『東大VR研究「五感インタフェース」で得られるより豊かな疑似体験とは?』
身体認識の境界線が“融(と)けていく”
本実験には、健常者16名が参加し、ロボットアームを使ったボールタッチ課題に取り組んだ。その結果、「自分の腕が増えた」という感覚(余剰肢感覚)の芽生えや、ロボットアームを装着した際のシステム周囲に対する知覚(近位空間)に変化が起こることを捉え、ロボットアームを身体化できる、つまり「ロボットアームがあたかも自分の体の一部であるかのように認識する可能性を示す」ことに成功したという。
「これまでの余剰肢ロボットシステム研究における評価は、あるユースケースにおいて精度よく動かせたといった『パフォーマンス評価』が大多数を占めていました。それはシステムの効果測定としてタスクパフォーマンスの評価をする意味では正しいと思いますが、我々が扱っている認知神経科学(の身体化)の疑問には答えていませんでした。そこに対する答えをきちんと出せたという意味で、今回の実験は価値あるものだったと考えています」(荒井氏)
さらに荒井氏は、実験結果の興味深い点として、今回のような装用学習を繰り返すことで、「自己と他者の境界線が融(と)ける」といったことが起こり得るのではないかと説明を続ける。
「もともと身体化を考えるときには、人間は自己と他者(外部環境)との間に、しっかりと境界線を持っているという前提があります。しかし、今回のような装用学習を繰り返すことで、脳が柔軟に対応し、外部環境にあったものが、だんだん自己の中に踏み込んでくる可能性が高い。もっと言えば、身体認識の境界線があいまいになり、融けていくということが言えるのではないかと。今回の実験を通して、人間のそういった感覚も示せるのではないかと期待しています」
メタバース空間での体験はどうなる?
本研究が進んでいくことで、「余剰肢ロボットシステムを設計する際、『抵抗感(違和感)のない操作』を実現するための評価指標を提示できるようになる可能性が高い」と荒井氏は話す。
「今後、さまざまな余剰肢ロボットシステムが開発されていくと考えられますが、日常的に使用・活用されるためには、やはり身体化できるかどうかが大事だと思います。そのための評価指標を示せるようになると考えています」
では、元来人間の身体に属していない部位を身体化できるようになると、メタバース空間での体験にどのような影響をもたらすのだろう。
「メタバース空間を利用する際には、自分の分身体であるアバターを選択することになりますが、その分身体は、性別や形態だけでなく、生体ましてや空想上の動物ですら自由に選ぶことができます。ただ分身体をどう定義したところで、それを操作する自分の(リアルな)身体は変わりません。」
「一方で、メタバース空間においては新しい自分がいて、そこに対する自己帰属感、つまり『自分である』という感覚は、今回の実験のテーマでもある身体化に必ずつながってくるものと考えられます。」
「またこの話は、先ほどお話しした『身体認知の境界線が融ける』話にもつながっています。境界線が、自己からどんどんアバターの方に寄って行った際には、もしアバターに腕が5本あれば、リアルな自分にも腕が5本ある、アバターに羽が生えていれば、リアルな自分にも羽があるといった感覚を得られる可能性もあるでしょう。そういう意味では、将来的には(アバターの形態に合わせて)、自分の(リアルな)形態も変えられるような感覚を得られるようになるかもしれません。今回の余剰肢ロボティクスの実験は、その可能性のひとつを示せたのではないかと考えています」(荒井氏)
関連記事









