
6000メートルの深海を探る「自律型」のロボット技術の今
「複数の自律型海中ロボットの隊列制御による高効率な海底調査技術」について解説する国立研究開発法人 海洋研究開発機構の大澤弘敬氏(右)と、国立研究開発法人 海上・港湾・航空技術研究所の金岡秀氏(左)
エネルギー・鉱物資源に乏しい日本は、そのほとんどを輸入に頼っており、安定供給の不安を常に抱えている。しかし近年、日本の周辺海域に、メタンハイドレートや石油・天然ガスなどのエネルギー資源のほか、金属成分を豊富に含む「海底熱水鉱床」や、コバルト、ニッケルなどを大量に含む「マンガン団塊」、さらに、電気自動車などの先端産業に欠かせない「レアアース泥」が豊富に分布していることがわかり、これらを産業利用するための技術開発に大きな期待が寄せられている。
こうした中で「高精度な調査が行える」と有望視されているのが、深海で詳細なデータを集めることができる“海中ロボット”だ。特に、操縦のためにケーブルにつなげる必要がなく、広範囲な海底調査が行える自律型海中ロボット「AUV(Autonomous Underwater Vehicle)」を使った海底資源調査技術の開発に注目が集まっている。
内閣府・戦略的イノベーション創造プログラムが選択した海洋課題「革新的深海資源調査技術」(以下、SIP海洋)に取り組むプロジェクトチームは、南鳥島沖約6000mの深海に存在するレアアース泥の調査を目的に、複数かつ異なった機種のAUVを同時に調査航行に活用できる技術を開発した。
本技術開発の狙いや展望を、国立研究開発法人 海洋研究開発機構(JAMSTEC)深海資源調査技術開発プロジェクトチーム長の大澤弘敬博士(工学)と、国立研究開発法人 海上・港湾・航空技術研究所 海上技術安全研究所 上席研究員で、実海域試験統括を務めた金岡秀博士(工学)に聞いた。
そこに「ある」ものを見逃さないために

そもそも、なぜ海底資源調査に海中ロボットを使う必要があるのだろうか。大澤氏はその主な理由を、「本来そこに『ある』はずの資源を、『ない』ものとして認識してしまうのを避けるため」だと説明する。
従来の海底鉱物資源の調査では、海上の調査船から音波を発し、海底から返ってきた音波の強弱によって海底の地形を調べていた。しかし深海では、音波が減衰してしまうため、精度が著しく低下する傾向にあったという。
「例えば、日本近海の水深1600mあたりには海底熱水鉱床があることがわかっていますが、船から音波を発する調査だと、精度が悪いため、わずか数メートルの起伏である熱水鉱床の火山(チムニー)を見つけるのが難しく、本当は『ある』はずなのに、『ない』ものと認識してしまう可能性があります。さらに、深くなれば深くなるほど精度が落ちますから、約6000mの深海にあるレアアース泥の存在を調べるには、やはり海底近くまで潜水し、そこで音波を発することができる海中ロボットが必要になります」(大澤氏)
ではSIP海洋のプロジェクトチームが海底資源調査に活用している自律型海中ロボット「AUV」とはどのようなものか。大澤氏によると、現在使われている海中ロボットには、大きく2種類あり、そのひとつがAUVとのこと。もうひとつが、ケーブルを介して人が操縦する遠隔操作型の海中ロボット「ROV:Remotely Operated Vehicle」だ。
「ROVと比べて、AUVはケーブルによる行動制限がありません。このため、広範囲の海底調査を行うときには欠かせないツールとなっています」(大澤氏)
ただしAUVには、現時点でAI(人工知能)は搭載されておらず、基本的に、プログラミングされたコースに沿って探査する仕組みになっている。金氏によると、「自律型」と言われているものの、今のところ、その挙動を遠隔で監視する必要があり、「完全自律型」には達していないという。
「例えば、海中で予期せぬ障害物に出会ったときに、自分で避けるとか浮上するなどの危険回避の機能は備わっていますが、人間や生物のように、周りの環境を全て把握して、最適な行動が取れるかというとそうではない。現時点のAUVは、人間が判断の基準を与える必要がある『Automatic(自動型)』と、機械が自ら判断して行動する『Autonomous(自律型)』の中間ぐらいに位置しています。もちろん将来的には、『Fully Autonomous(完全自律型)』を目指します」(金氏)
なぜ複数機のAUVを動かすのか
今回、SIP海洋のプロジェクトチームが開発した技術は、複数・異機種のAUVを使って、高効率な海底調査を行うというものだ。なぜ複数機のAUVが必要なのだろう。

金氏によると、空気の約1000倍の密度がある水中では、同じ速力だと空気の約1000倍の抗力がかかるため、AUVを高速化するのは非常に難しい。その一方で、日本の排他的経済水域(EEZ)の広さは世界6位で、国土面積の約12倍もある。これをAUV1台で調査するとなると、「24時間365日連続稼働させても、百数十年かかる」という。
「広大な日本の海をいかに効率的に調査するか。単純かつ確実な方法は、AUVの台数を増やすことです。台数を増やせば、その分、調査時間が短縮されます。さらに、現在の調査ではAUVを制御するために調査船を必ず使いますが、一艘の船で複数機のAUVを同時に制御できれば、船の利用効率もその分向上します。」(金氏)
しかし、海中で複数機のAUVを同時に動かすのは、そう簡単なことではない。なぜなら海中には、海流などAUVの動きを乱す要素が多数ある上、機種の違いや個体差もあるため、「一列になってスタートし、同じスピードで航走しても、時間が経つにつれ、(予定通りに進まず)その位置は必ずバラバラになる」(金氏)。
さらに海中には電波が届かないため、AUVとの通信は音波に頼らざるを得ないが、音波は通信速度が遅いため、一台ずつ通信していると、時間的なズレが生じてしまう。また、音波は届く範囲が限られているため、AUVが動くエリアを一定範囲内に留める必要もある。
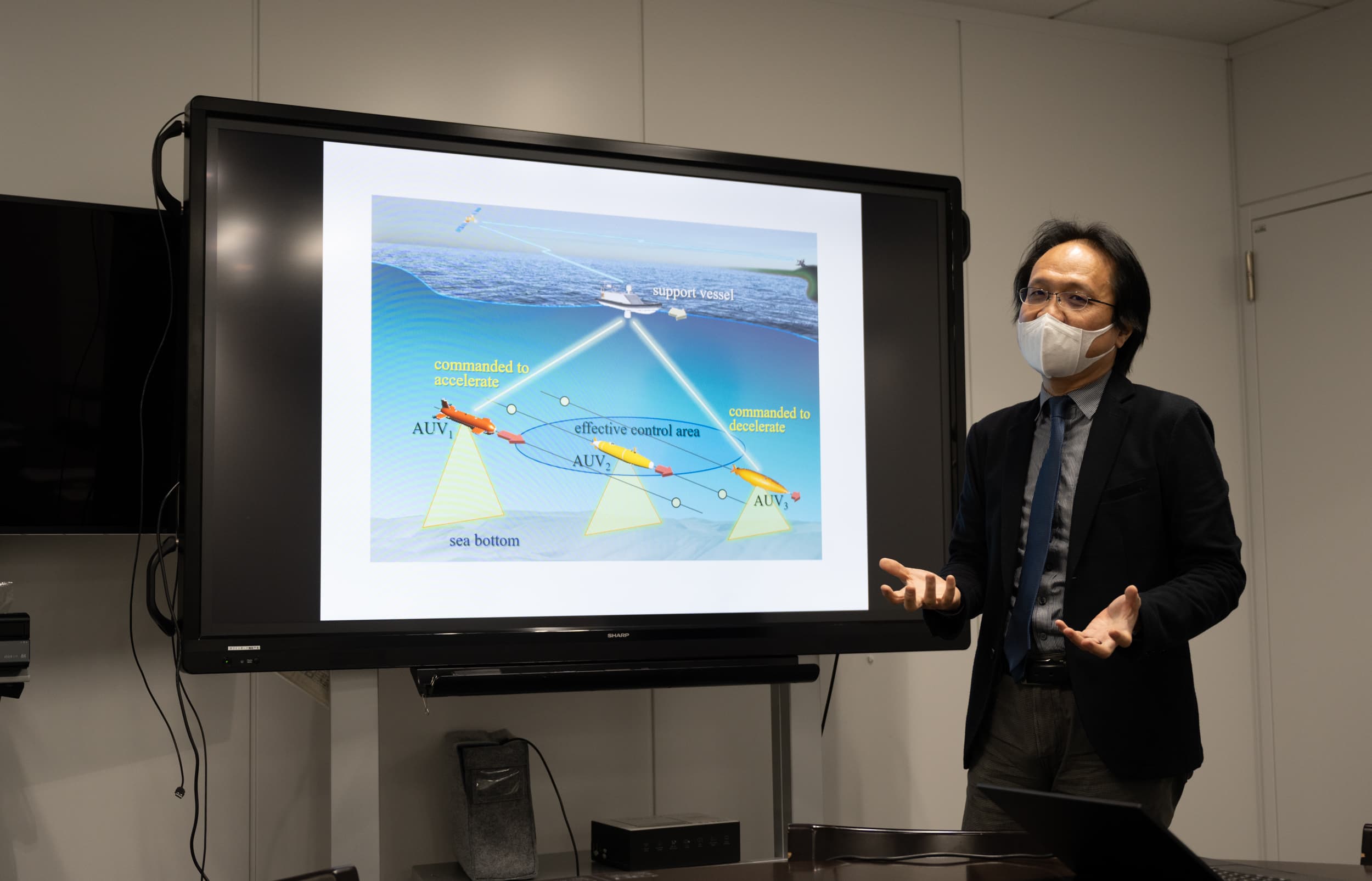
こうした課題を解決するために、SIP海洋のプロジェクトチームが開発したのが、複数・異機種のAUVと同時に通信できる「マルチユーザー音響通信測位装置」と、AUVに隊列を組ませて、音波が届く範囲内に留まるように制御する「隊列制御」の仕組みだ。
「複数・異機種のAUVで効率的に海底を地形調査するためには、技術的なボトルネックがいくつかありましたが、これらを解決できたことが、今回の技術開発の大きな成果のひとつです」(大澤氏)
SIP海洋のプロジェクトチームは、2022年9月に駿河湾(水深約1400m海域)にて、本技術の実海域試験を実施。1機の無人洋上中継機ASV(Autonomous Surface Vehicle)を介して、性能とメーカーの異なる4機のAUVで海底地形調査を行い、従来手法よりも高効率かつ高精度な海底調査が行えることを実証した。
目指すは海洋調査の「省人化」

これから海底資源調査の技術開発はどのような方向に進むのか。「大きな方向性としては『省力省人化』を目指す」と大澤氏は展望を示す。
駿河湾で行われた海洋試験では、無人洋上中継機ASVを介して複数機のAUVを制御したが、このASVも、AUV同様の「自律型」で、将来的には「完全自律型」を目指しているという。
現在の海底資源調査では、大勢の船員やスタッフが調査船に乗り、長期間海上で調査を行っており、負担が大きい。しかし、陸上の基地局から衛星を介して海上にあるASVを制御し、さらにASVを介して海中のAUVをコントロールできるようになれば、「調査船を一切使わずに済み、さまざまな負担やコストを低減できる」と、大澤氏はそのメリットの大きさを強調する。
「今後は、陸上の基地局から衛星、ASV、AUVをシームレスにつなぐ仕組みを構築することで、海底資源調査の『省力省人化』に寄与していきます」(大澤氏)
複数・異機種のAUVを制御する技術がさらに発展していけば、洋上風力発電のメンテナンスや養殖魚の管理など、海底資源調査以外の用途にAUVを活用できる可能性も高まるという。
頭上の宇宙もさることながら、日本の周りに広がる海には大きな可能性が秘められている。当媒体でも海中探索に必要な海中無線通信などを紹介してきたが、引き続き、こうした海を探索する技術の進化に注目していきたい。
関連記事






