
人間とロボットが一緒に働く時代 人に必要な配慮とそれを実現する技術とは
NECサイバーフィジカルインテリジェンス研究所の池田浩雄氏(左)と金友大氏(右)
物流や製造業の現場では、労働力不足への対応や作業効率向上のため、ロボット導入の期待が高まっている。しかし、人とロボットが協働するためには、衝突や接触などを避ける「身体的な安全性」に加え、作業員がロボットに感じる不安を軽減する「心理的な安全性」にも配慮する必要がある。
実際に、AIの安全性を検討する「AIセーフティ・インスティチュート」(AISI)など国内外の公的機関も、ロボットにAIを搭載していく際に「心理的リスクに配慮する必要がある」と提言している。
こうした中、日本電気株式会社(以下、NEC)では、人の動きと心理状態を予測する独自の「世界モデル(人間系世界モデル)※」を活用し、人の不安を定量的に推定したうえで、先回りしてロボットを制御するフィジカルAIを開発した。これにより、物流倉庫などで人と共に働くロボットが、人の不安を軽減できるような経路や速度で自律走行できるようになるという。
※世界モデルとは、人間が経験から世界の常識を学ぶように、観測データからAIに世界の構造を理解させ、未知予測(シミュレート)を実現する仕組み
同技術はどのような仕組みになっているのか。また、どのような現場での活用が期待されているのか。NECサイバーフィジカルインテリジェンス研究所 実世界モデリング研究グループ シニアプロフェッショナルの金友大氏と、同研究所 主任研究員の池田浩雄氏に話を聞いた。
「心理的な安全性」と「効率」の両立
ロボットと人が協働する産業現場において、心理的な安全性と効率を両立することは容易ではない。たとえば、一分一秒の無駄を削りながら効率化を目指す倉庫の輸送作業などでは、ロボットが人を避けて大回りしていては、作業効率が落ちてしまうことになる。かといって、ロボットが人の直前で停止すると、人は不安を感じ、気が散るなどして、これまた作業効率が落ちてしまう。

「つまり、ロボットを単純なルールで動作させると、『人が不安に感じない』ことと『効率性』を両立することが難しくなるというわけです」(金友氏)
そこでNECが開発に着手したのが、ロボットが人と近づく際に、互いの位置関係から、人の不安度をリアルタイムで予測し、制御するAI技術だ。これによりロボットは人と接触せず、不安も感じさせない”最小限の回避 “で走行でき、現場の作業効率を維持できるというわけだ。
では、どのような仕組みになっているのか。金友氏によると、ロボットを動かす大まかな流れは、以下のようになっている。
たとえば人が近づいてきた場合、AIはロボットの走行経路や速度を複数生成する。さらに、それぞれのケースにおける人の動きと不安を予測したうえで、最も人が不安を感じず、走行効率がいい経路・速度を選び、進んでいくことになる。
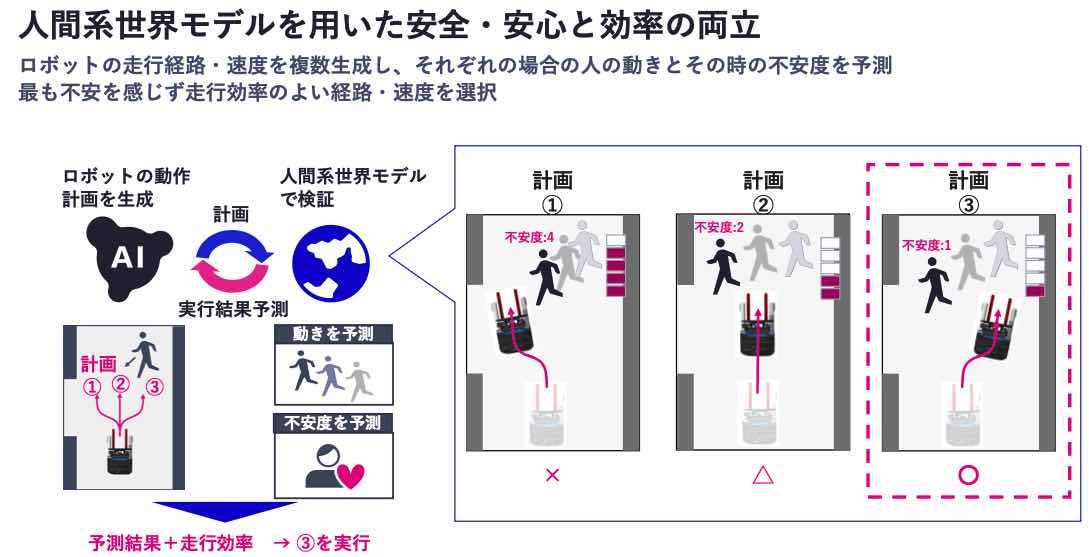
さらりと書いたが、実はAIが「複数の選択肢を生成したうえで、それぞれの人の動きや不安度を予測して、最適なものを選ぶ」ことは簡単ではない。なぜならこれを実現するには、AIが「人のいる実世界がどういうものか」を解釈し、(何かアクションが起こった場合に)次に何が起こるか、あるいは隠れている空間はどうなっているのかを予測・想像する必要があるからだ。
「こうしたことを実現するための鍵となるのが『世界モデル』の開発です」(金友氏)
「世界モデル」とは何か?
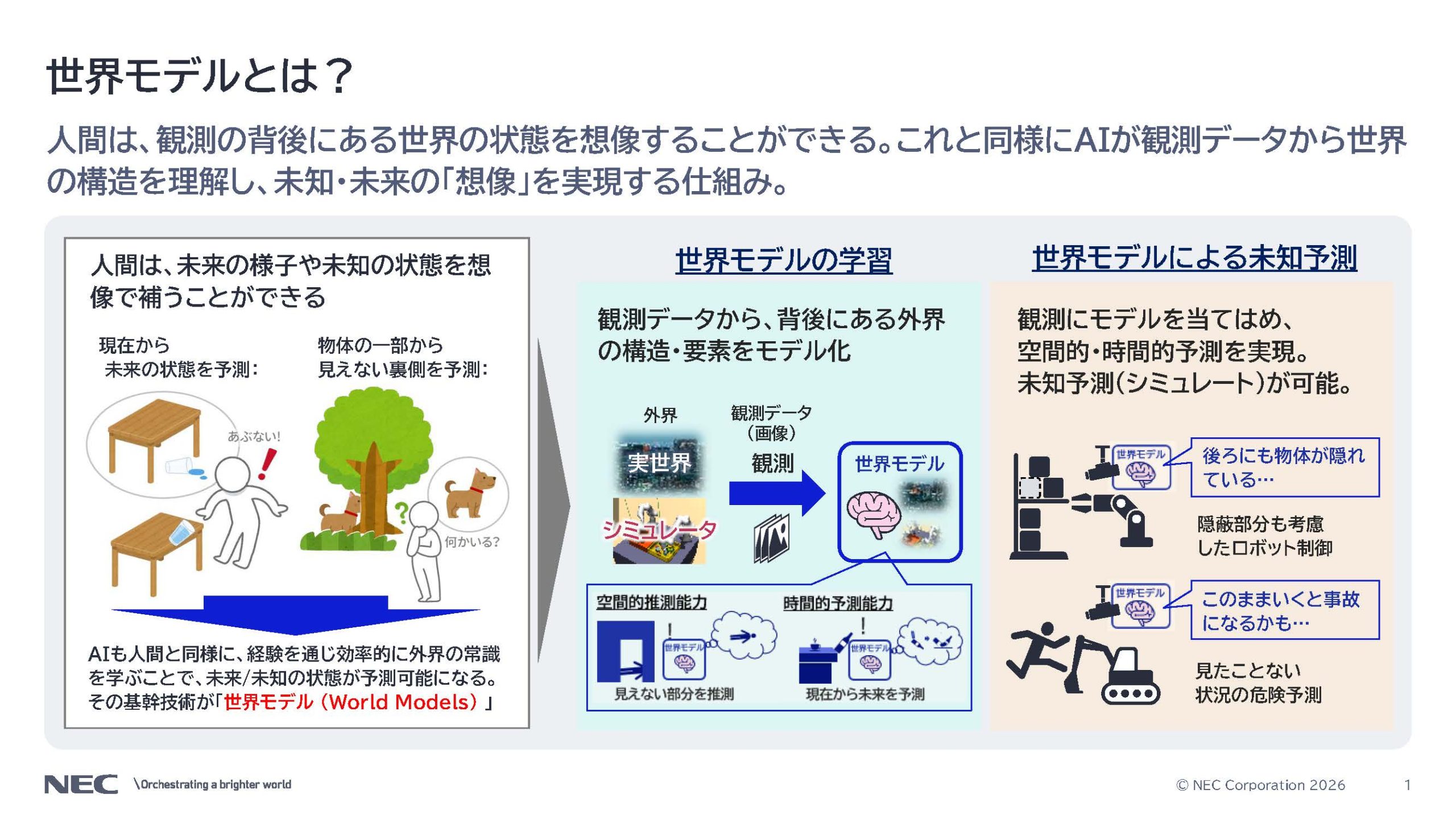
人は、過去の経験などから自身の周辺にある「世界」の構造を認識しているため、目や耳などから情報を受け取った際に、少し未来に起こることや未知の要素を想像できる。たとえば、コップが倒れそうになったら、次の瞬間にそれが地面に落ちて割れることを想像できるし、ドアの向こうに机の一部が見えたら、見えていない部分を頭の中で想像し、全体像をイメージすることもできるだろう。
池田氏によると、こうしたことをAIで実現するのが、世界モデルのアプローチだという。つまり、AIにさまざまな観測データをもとに、外界の“常識”を学ばせて、それをもとに少し未来に起こることや未知の要素を想像(予測)させるというわけだ。
これによりAIは、見たことがない状況の危険予測(時間的予測)ができるほか、隠れた部分を推測すること(空間的推測)などが可能になる。
「たとえば(世界モデルを学んだAIが操作する)ロボットハンドであれば、物がならんだ棚の前面の状態を見て、『後ろに何かが隠れている』と予測したうえで、物をつかむことができます。あるいは(世界モデルを学んだAIが操作する)クレーン車であれば、人が走ってきた時に『このままではクレーンにあたって事故になるかもしれない』と危険予測して、動きを制御することができます」(池田氏)
ちなみに、世界モデルの学習方法をざっと説明すると以下のようになる。まずAIにある画像や映像を与え、それにある条件付けをした(何かアクションを加えた)際に、どのような画像や映像になるかを予測させる。その回答に対して、実際に変化が起きた画像や映像、つまり正解を与え、その誤差をなくすよう繰り返し学習させる。
「最初AIは的外れな予測をしますが、繰り返し学習することで精度が上がり、最終的にはきちんと予測できる世界モデルができあがります」(金友氏)

これまでNECでは、AIに映像の中の「物体」に着目させたうえで、ロボットアームがその物体に触れたら、物体がどのような振る舞いをするかを予測させる「物体中心の世界モデル」を開発している。さらに、この世界モデルを用いて、従来の産業ロボットのように一つひとつ細かく指示を与えなくても、自律的に(複数パターンの動きを生成したうえで)最適な動きを選べるようなロボットアームを開発していた。
「こうした世界モデルによるロボット制御を、人の動きや心理の予測に応用して開発したのが、今回のフィジカルAIです」(池田氏)
つまり「物体中心の世界モデル」を経て、人間の動きや心理を予測する「人間系世界モデル」を開発するに至ったというわけだ。
「人間系世界モデル」2つの要素
では「人間系世界モデル」とはどのようなものか。池田氏は、人間系世界モデルは「人の動きの予測」と「人の不安度の予測」という2つの要素で成り立っていると説明する。
まず「人の動きの予測」は、カメラ映像から、人体の3D骨格情報に基づいて、(数秒先の)人の立体的な動きを予測するものだ。単に人の動きを予測するだけでなく、そこに「(カメラを搭載した)ロボットの動きへの対応」と「周辺環境への対応」という2つの情報を加え、より予測の精度を高めている点がポイントだという。
もうひとつの「人の不安度の予測」はどのようなものだろう。金友氏によると、ロボットとの距離や方向、速さから、時々刻々と変化する人の不安度を予測するものだという。
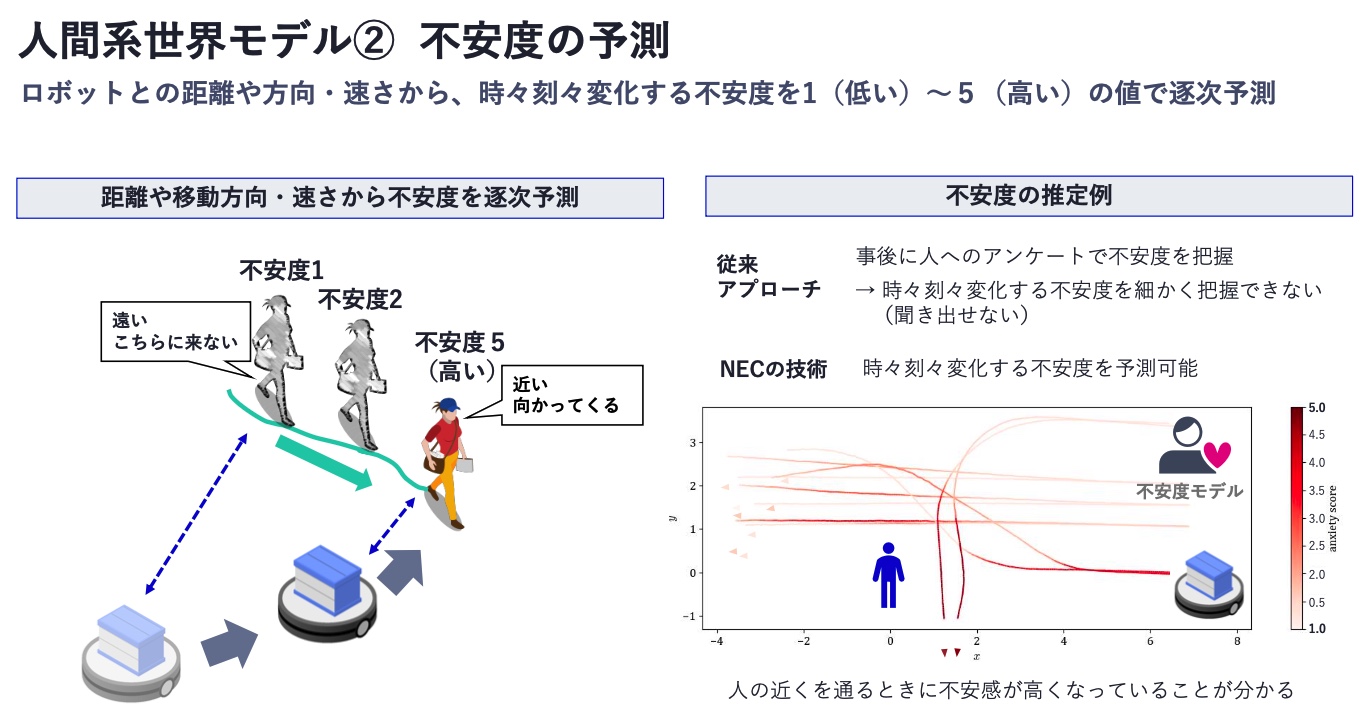
「たとえば(上図右側の)一番左側の位置関係の場合の不安度は1。真ん中の位置関係になると、不安度は2になる。さらに近づくと、一番右側の位置関係では、不安度が5になると。こういった形で常に変化する不安度をリアルタイムに予測することができます」(金友氏)
心理学のアンケート調査など従来の手法でも、ロボットとの距離や速度に合わせて、人がどのように不安を感じるかを調べることは可能だろう。しかし、この場合は絶え間なく変化する不安度を、その都度予測することはできない。
それに対して今回の技術では、事前に行った不安度のアンケート調査のデータをもとに世界モデルを作っているため、AIが刻々と変化する不安度をリアルタイムに予測できる。この点が、従来手法との大きな違いだと金友氏は強調した。
2027年度の実用化を目指して
現在NECでは、今回のフィジカルAIの主な適用先を「倉庫・工場」と「小売店・商業施設」の2つと想定しており、「まずは物流倉庫などで使う(自律型)フォークリフトなどから導入していき、2027年度には実用化したい」と金友氏は展望を語る。
「倉庫や工場の現場というのは、やはり効率と安全の両立が非常に重要なので、そういったところにはニーズがあるだろうと考えています。また、小売店は一般のお客様に不安を感じさせないことが重要ですので、ロボットで人手不足を解消する際に、私たちの技術が役立つと考えています」(金友氏)
加えて「公的機関と連携して、ロボットと人の協働における心理的リスク解消のためのガイドライン作りなどにも貢献したい」(池田氏)考えもあるとのことだ。
なお、現時点では「実証現場を増やすこと」と、さまざまな環境に合わせた「世界モデルの開発スピードを上げること」が実用化に向けた課題になるものの、これも「今後開発を続けていくことで解消可能」だと金友氏は自信をのぞかせた。
この先、ヒューマノイドなどが家庭や仕事現場に入っていく際にも、今回のような心理的な安全性に配慮するための技術は欠かせないだろう。今後の展開を引き続き注視したい。
関連記事








 「AGIが現実となる世界で、スタートアップは何を創るべきか」を問う 「Series T – Post AGI from Kyoto」参加エントリー受付開始
「AGIが現実となる世界で、スタートアップは何を創るべきか」を問う 「Series T – Post AGI from Kyoto」参加エントリー受付開始